Nota. Questo rticolo è stato realizzato con il supporto del motore di ricerca Google e del LLM Copilot+CHATGPT4
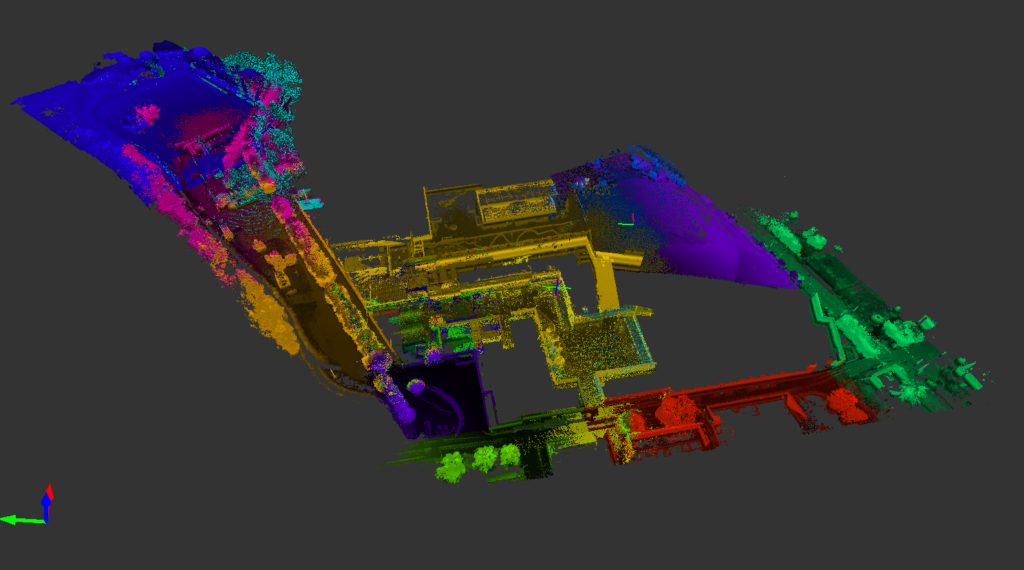
Il rilievo LiDAR SLAM (Light Detection and Ranging Simultaneous Localization and Mapping) è un processo che permette a sistemi autonomi ( siano umani o robot) di costruire una mappa di un ambiente sconosciuto mentre, contemporaneamente, determinano la loro posizione all’interno di quella mappa. La caratteristica unica di questo processo è che avviene “in movimento”, cioè bisogna muoversi nello spazio, in modo che i dati forniti dal LiDAR e contemporaneamente da una piattaforma inerziale (IMU) all’interno dello strumento consentono di calcolare e di posizionarsi nell’ambiente circostante. Spostando la posizione dello strumento all’interno dell’area, tutte le geometrie dell’ambiente, cioè muri, pavimenti, pilastri, etc., assumono la posizione relativa al dispositivo e l’algoritmo SLAM stima le loro coordinate con le nuove informazioni di posizione.
Il processo si basa sull’uso di due tecnologie:
1- sensori LiDAR, che emettono impulsi laser e misurano il tempo che questi impulsi impiegano a rimbalzare indietro dopo aver colpito oggetti nel loro percorso. Analizzando i segnali laser di ritorno, i sistemi LiDAR SLAM possono creare nuvole di punti 3D dettagliate che rappresentano l’ambiente e utilizzare queste informazioni per stimare la posizione e l’orientamento del robot all’interno della mappa.

2- algoritmi SLAM (Simultaneous Localization and Mapping), acronimo che evidenzia i due compiti principali del processo: la localizzazione, che si riferisce alla determinazione della posizione e dell’orientamento del robot all’interno della mappa, e la mappatura, che implica la creazione di una rappresentazione spaziale dell’ambiente.

Queste due tecnologie influenzano in modo molto marcato lo strumento che si utilizza, sensore+algoritmo, e ne determinano i suoi pregi e i suoi limiti.
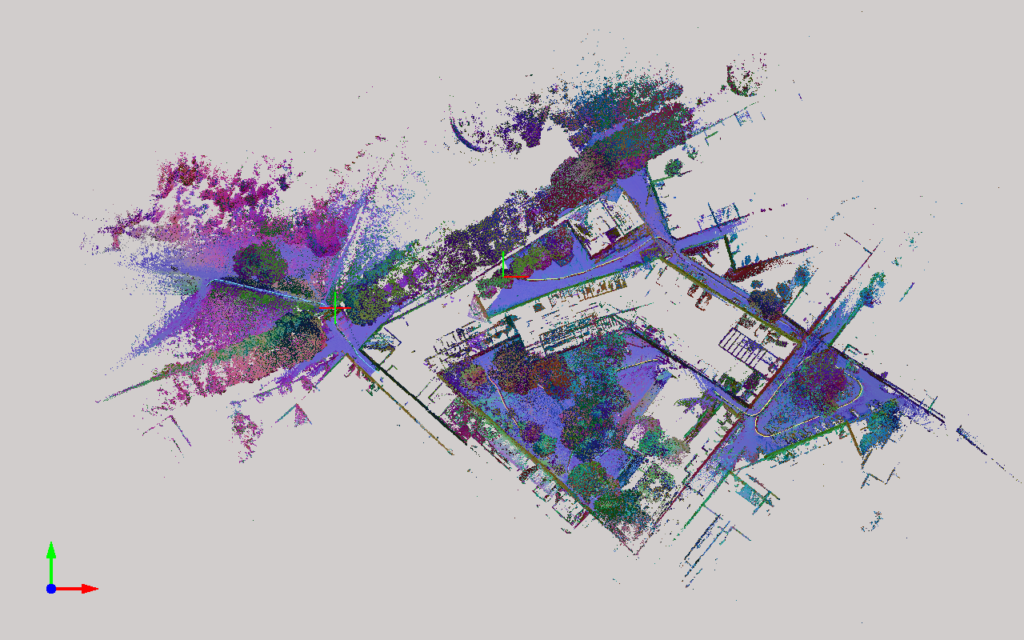
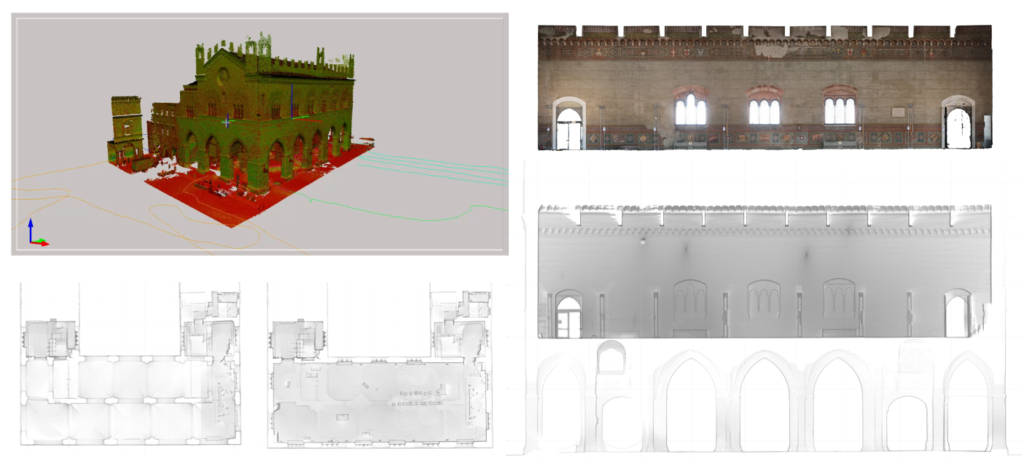
Una delle applicazioni che ritengo di maggior interesse per il processo LiDAR SLAM è quella del rilievo architettonico urbano, cioè per l’acquisizione di dati geometrico morfologici dell’assetto di grandi spazi urbani. Questo processo infatti consente di acquisire un numero molto elevato di dati in un tempo relativamente breve.
Quando si utilizza uno strumento LiDAR SLAM per rilevare uno spazio urbano, camminando quindi fisicamente dentro, è importante seguire alcune regole di base.
Ecco alcuni passaggi chiave da seguire che ho appreso nel corso della mia esperienza:
- Pianificazione del Percorso: Prima di iniziare, pianifica un percorso che copra tutte le aree di interesse, assicurandoti di passare per ogni zona almeno una volta.
- Calibrazione dello Strumento: Assicurati che il LiDAR SLAM sia correttamente calibrato e pronto per l’uso.
- Velocità Costante: Mantieni una velocità di camminata costante per evitare distorsioni o bruschi cambi di moviemtno dello strumento.
- Controllo dei Dati: Periodicamente, controlla i dati raccolti per assicurarti che non ci siano lacune o errori evidenti.
- Uso di Punti di Riferimento: Se possibile, utilizza punti di riferimento noti per aiutare nella localizzazione e nell’orientamento all’interno della mappa.
- Elaborazione dei Dati: Dopo la raccolta, elabora i dati con il software appropriato per creare una mappa dettagliata dell’area.
- Verifica e Correzione: Infine, verifica la mappa risultante e apporta eventuali correzioni necessarie per migliorare l’accuratezza.
La fase più importante è quella della pianificazione perchè ci aiuta a definire la giusta sequenza delle traiettorie di acquisizione per garantire la massima copertura e precisione dei dati.
Nel proceso SLAM tutavia per caratteristiche insite nell’algoritmo si devono tenere in considerazione alcuni principi fondamentali utili sia in fase di painificazione che sul campo.
Ecco quelli che ritengo indispensabili avere sempre ben in mente:
- Copertura Completa: Assicurati che la traiettoria passi attraverso tutte le aree dell’ambiente da mappare per evitare lacune nella raccolta dei dati.
- Sovrapposizione Minima: Evita sovrapposizioni eccessive che potrebbero complicare l’elaborazione dei dati e la creazione della mappa.
- Movimento Uniforme: Mantieni una velocità costante e movimenti fluidi per evitare distorsioni nei dati.
- Punti di Riferimento: Utilizza punti di riferimento noti, se disponibili, per migliorare la localizzazione e l’orientamento nella mappa.
- Variazione dell’Altezza: Se possibile, varia l’altezza di acquisizione per catturare diverse prospettive e migliorare la ricostruzione 3D.
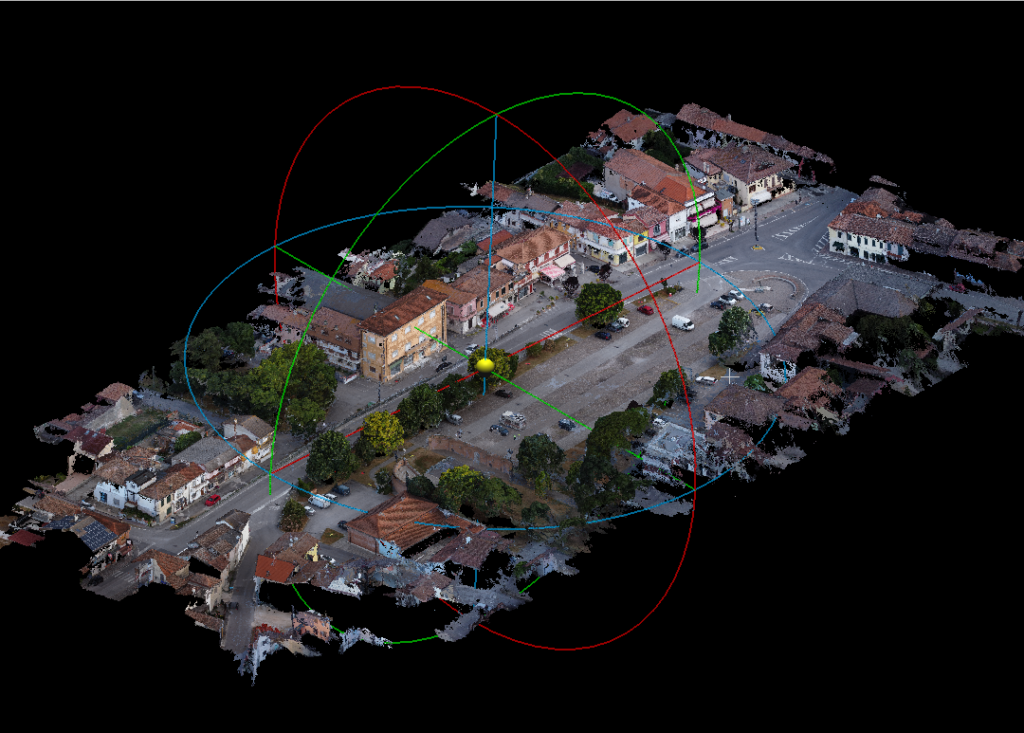
- Chiusura del Ciclo. Torna sempre al punto di partenza della sessione di acquisizione
La traiettoria in un rilievo LiDAR SLAM non deve necessariamente essere circolare, ma tornare al punto di partenza, chiusura del ciclo, può essere vantaggioso per diversi motivi:
- Chiusura del Ciclo: Tornare al punto di partenza permette di chiudere il ciclo, ovvero di collegare l’ultimo punto della traiettoria con il primo. Questo aiuta a correggere eventuali errori di deriva accumulati durante la mappatura.
- Convalida dei Dati: Rientrare nel punto di partenza consente di confrontare i dati iniziali con quelli finali per verificare la coerenza e l’accuratezza della mappatura.
- Ottimizzazione della Mappa: La chiusura del ciclo è un’opportunità per ottimizzare la mappa, migliorando la localizzazione e riducendo gli errori.
- Rafforzamento dei Dati: Ripassare per il punto di partenza può rafforzare i dati raccolti, fornendo una seconda misurazione delle stesse aree che può essere utilizzata per affinare la mappa.
Tuttavia, la forma della traiettoria varierà a seconda dell’ambiente e degli obiettivi specifici del rilievo. L’importante è assicurarsi che la traiettoria scelta massimizzi la copertura dell’area e consenta di disporre di tati sufficientemente ridondanti rispetto agli obiettivi del progetto.
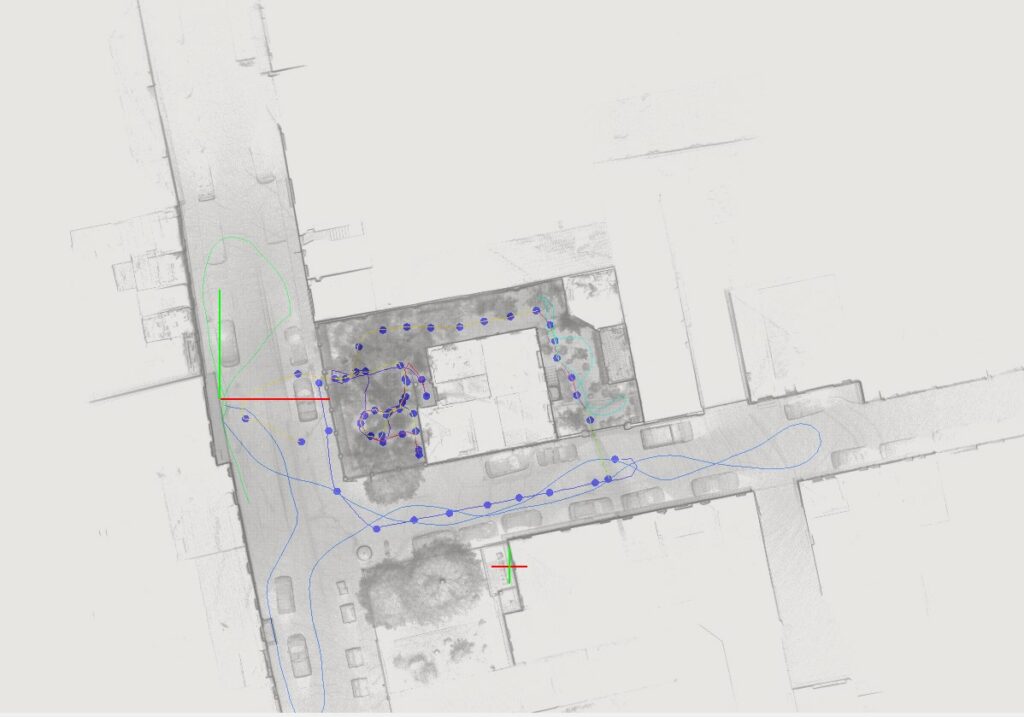
Un secondo aspetto fondamentale nel processo LiDAR SLAM è la necessità di punti di riferimento per la precisione e l’accuratezza globale della mappatura e localizzazione.
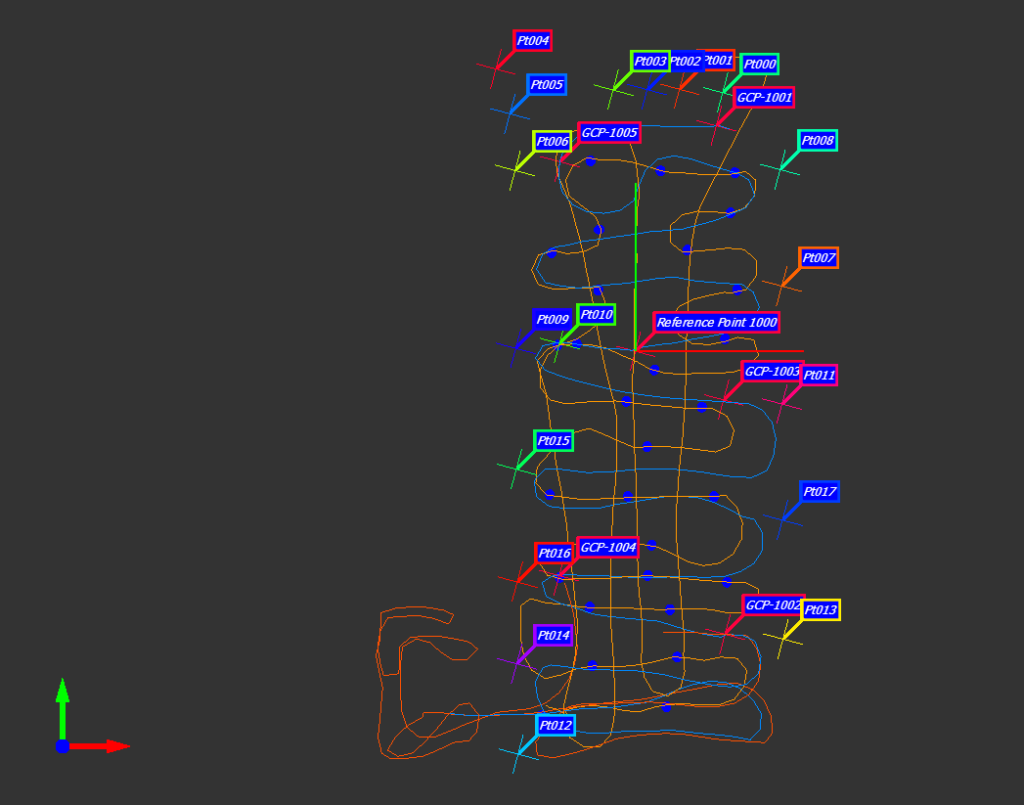
I punti di riferimento possono essere molteplici, essi possono essere individuati direttamente sull’oggetto come spigoli, segnaletica stradale, punti comunque ben riconoscibili e visibili, oppure possono essere fisicizzati mediante chiodi topografici o target. In sintesi per punti di riferimento si intendono tutte quelle caratteristiche specifiche e facilmente riconoscibili nell’ambiente che possono essere identificate in modo affidabile dai sensori LiDAR o da altri sensori di immagine.
I punti di riferimento vengono rilevati e identificati sia durante la scansione SLAM, sia con altre strumentazioni topografiche come antenne GNSS o stazioni totali.

L’integrazione delle diverse metodologie di acqusizione della posizione del punto aumenta significativamente l’accuratezza dei sistemi LiDAR SLAM.
In sintesi il processo LiDAR SALM è un ottimo alleato per rilevare grandi spazi urbani, per definire i contorni di un edificio o di un isolato, e integrato con rilievi GNSS, celerimetrici e con fotogrammetria UAS rappresenta al momento la metodologia più significativa a nostra disposizione.